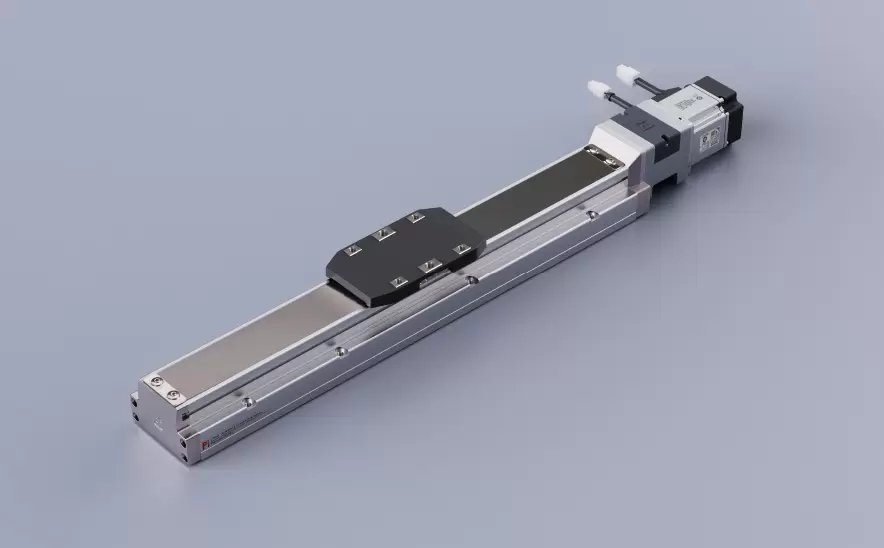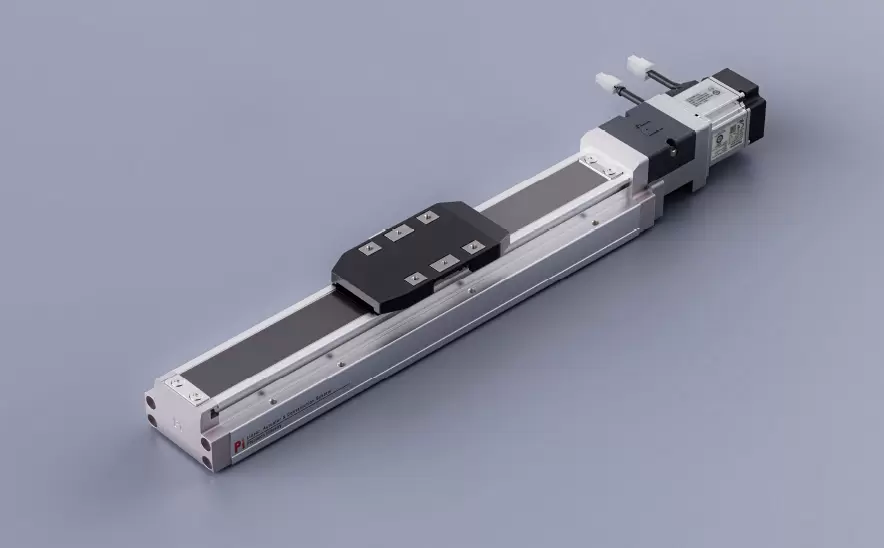
Motor Bottom Side
Repeatability:±0.005/0.01mmHorizontal Load:150kgVertical Load:55kgMaximum Speed:2000mm/sTravel Range:100-1500mm
 Current location:Home > Company > News > Latest news > Understanding Load, Speed, and Stroke Requirements for Ball Screw Linear Actuators
Current location:Home > Company > News > Latest news > Understanding Load, Speed, and Stroke Requirements for Ball Screw Linear Actuators Date: Dec 03 2025
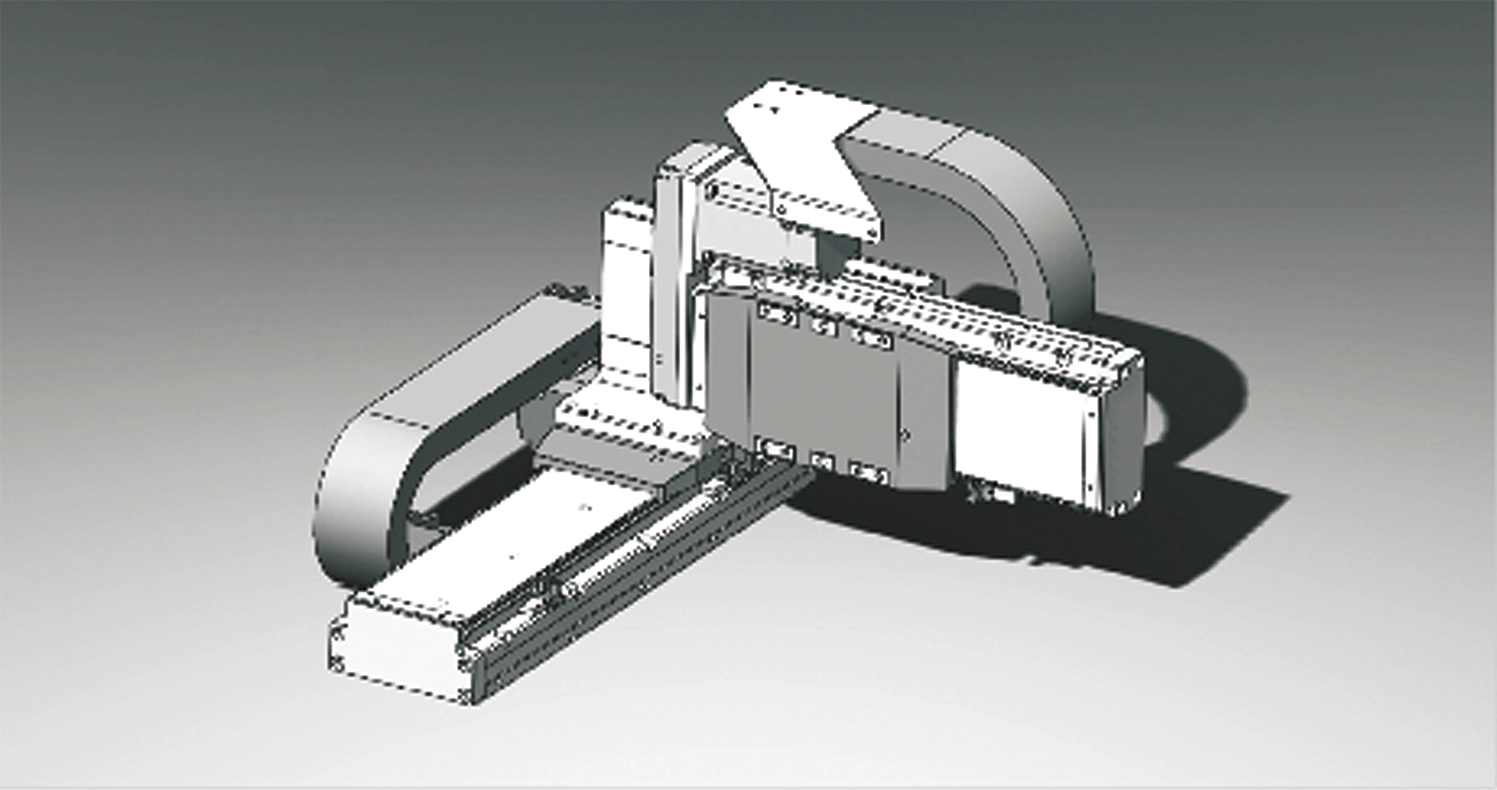
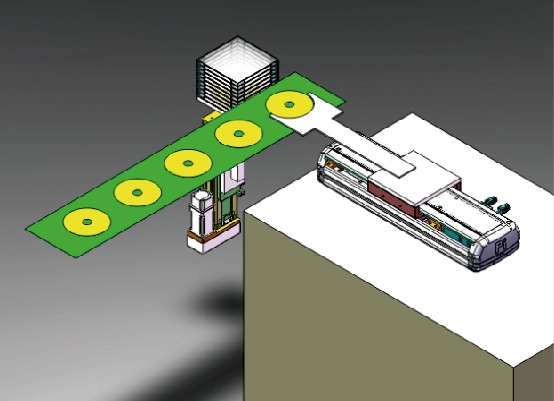
Ball screw linear actuators are essential components in precision automation. Their ability to deliver repeatable, accurate linear motion makes them widely used in semiconductor manufacturing, LCD assembly, PCB processing, medical equipment, automotive systems, and industrial testing platforms. Whether integrated into small inspection machines or large production lines, actuator performance depends heavily on how well the system’s requirements match the actuator’s mechanical capabilities.
Since its founding in 2003, Ruan has focused on improving industrial precision through high-quality motion components. With two industrial parks and more than 300 employees, the company’s Pi brand specializes in actuators, positioning modules, linear motors, electric cylinders, robotic extensions, and automation parts. This expertise provides critical insight into selecting and configuring the right Ball Screw Linear Actuator for real industrial environments.
This article explains three of the most fundamental factors in actuator selection: load, speed, and stroke. A clear understanding of these parameters ensures reliable machine performance, avoids premature wear, and improves long-term accuracy.
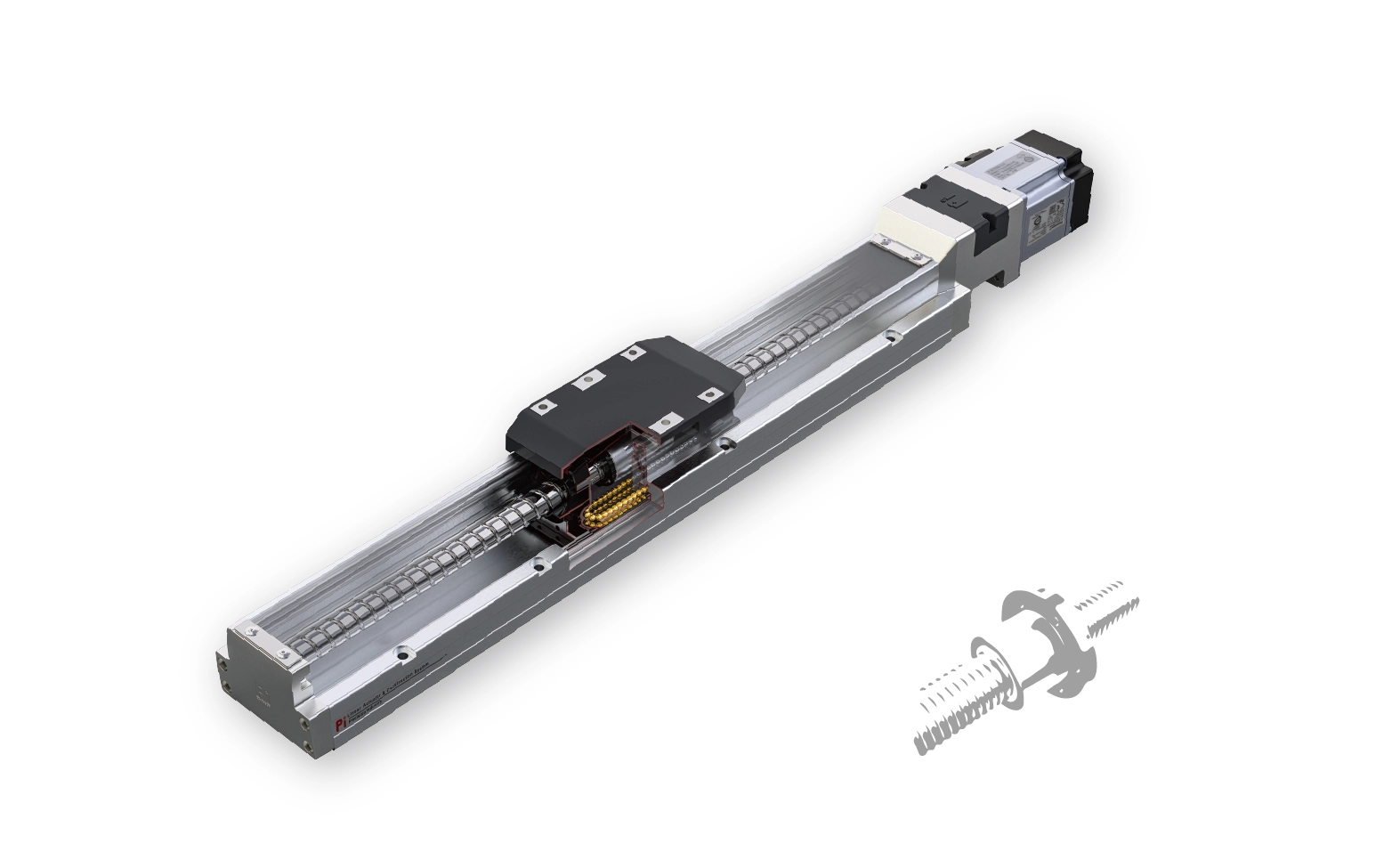
Load is one of the first parameters engineers must consider. A ball screw actuator converts rotational motion into linear travel, but the amount of force it can support depends on screw diameter, pitch, nut structure, bearing design, and rail stiffness.
This refers to forces applied while the actuator is holding position. Applications such as vertical lifting, assembly fixtures, or long holding cycles require high static load capacity. If the actuator is undersized, holding stability decreases and long-term screw deformation becomes more likely.
Dynamic load occurs during movement. High acceleration, deceleration, and rapid changes in direction add stress to the screw and nut. Actuators used in pick-and-place, inspection scanning, or fast indexing must support dynamic load ratings higher than the static load.
Ball screws are not designed to handle side forces. Side loads must be supported by linear guides or external bearings. Excessive side load can cause:
Increased friction
Uneven wear
Reduced repeatability
Shorter actuator lifespan
Engineers should consider:
Payload weight
Tooling force or pressing force
Inertia during acceleration
Vertical vs. horizontal orientation
Any off-center loads or multi-axis load paths
By accurately calculating load requirements, users can select an actuator that maintains rigidity and accuracy over years of operation.
Speed determines how quickly the actuator moves from one position to another, but achieving high speed with stability requires careful matching of screw pitch, motor selection, and mechanical design.
Higher screw pitch increases travel distance per motor revolution.
High pitch = higher speed, lower mechanical advantage
Low pitch = slower speed, higher precision and force
If an application demands fast travel and moderate force, a higher pitch may be suitable. For ultra-precise positioning, lower pitch designs are preferred.
Servo motors provide closed-loop control, smooth motion, and high-speed stability—ideal for dynamic automation. Stepper motors are suitable for moderate-speed, cost-sensitive systems.
Longer screws experience more vibration at high speed, known as screw whip. This imposes practical limits on speed depending on the screw diameter, support method, and bearing arrangement.
Heavier loads require slower acceleration to avoid stress on the screw and nut.
Required cycle time
Motor torque curve
Acceleration and jerk settings
Maximum permissible screw speed
Need for smooth low-speed motion (common in inspection systems)
Matching speed requirements correctly prevents resonance, reduces wear, and ensures accurate positioning.
Stroke defines how far the actuator can move. This parameter influences a wide range of mechanical design decisions.
The usable travel distance (effective stroke) is shorter than the actuator’s total length. Designers must account for:
End-of-travel safety margins
Motor and coupling length
Mounting area constraints
Longer travel requires a stiffer screw and stronger housing. Insufficient rigidity leads to:
Vibration
Reduced repeatability
Position drift
Inconsistent motion under load
For long-stroke applications, supported screw designs or alternative technologies like belt actuators or linear motors may be considered.
Higher cycle frequency over long travel increases:
Heat buildup
Nut wear
Lubrication consumption
Therefore, maintenance intervals must be adjusted accordingly.
These three parameters are not independent. Instead, they influence each other in practical engineering applications.
This combination creates strong dynamic forces. It requires:
Larger screw diameter
Preloaded nut with low backlash
Reinforced guide rails
This requires:
Larger screw to prevent deflection
Stable housing design
Controlled acceleration to avoid whip
Servo control tuning becomes critical. Lubrication and temperature stability also matter more.
Understanding how these factors work together ensures long-term actuator reliability and industrial-grade performance.
Ruan’s extensive experience in precision components ensures that each actuator is designed with:
Optimized screw geometry
High-rigidity housings
Precision ground rails
Stable travel accuracy
Reliable service life
Applications in semiconductor, medical equipment, LCD, PCB, and automation require extremely dependable motion components. A properly selected and configured actuator prevents:
Inaccurate assembly
Surface defects
Unstable inspection results
Reduced throughput
By understanding load, speed, and stroke requirements, engineers ensure that every actuator operates within its ideal performance range.
Selecting a ball screw linear actuator is not simply a matter of choosing a size or stroke. Load capacity, speed performance, and stroke length must be evaluated together to achieve reliable motion. With decades of experience in precision engineering, Ruan’s standardized and customized actuator solutions enable industrial users to meet demanding requirements across multiple sectors.
By making informed decisions grounded in mechanical principles, engineers ensure long-term accuracy, reduced maintenance, and stable machine operation.